项目负责人
课程介绍
本实验项目切实贯彻“加强基础,强化应用,提高素质,注重创新,激励个性,体现特色”的人才培养思路,努力强化学生虚拟现实设计的实践能力的培养。
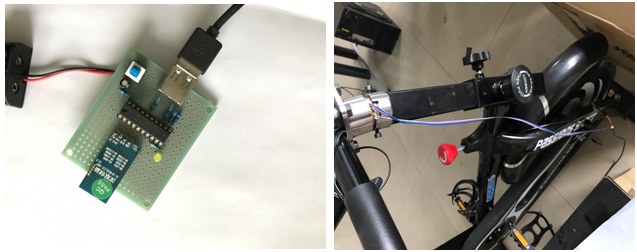
本实验项目的教学内容包括虚拟现实的基础,注重使学生理解虚拟现实交互技术的基本流程与关键技术,重点在于在动感单车的基础上为其添加的角度传感器以及光电传感器以获得自行车运动过程中的速度与方向信息,使用DSP实时通信技术,使传感器所或得数据及时稳定的传送到计算机,在虚拟现实的开发环境中,利用接收的数据模拟自行车的运动状态,在虚拟现实环境中进行呈现。
实验教学中主要包括课内和课外两种教学。一是课内实验教学指导,通过老师随堂演示、指导及相配套的实验报告的完成使学生能够基本掌握虚拟现实交互中软硬件结合实现新的拓展功能;二是开放的网络教学,注重特色人才培养,使对实验内容有兴趣的学生有条件进行深入的、综合性的实验培训,配备专门老师进行在线或离线指导。
本实验项目及实验环境对本校学生开放,接收国内高校及信息学科研究机构业务技术人员进修访问。实验项目的虚拟资源放置在专用服务器上,不仅对相关专业学生开放,而且对社会各个单位和个人开放,实验项目的所有资源均可以上网对公众开发,课件、实践指南等都可以通过互联网自由下载。利用虚拟技术构建交互式的实验教学与管理信息平台,建立自觉式、协作式的“学习共同体”的虚拟仿真实验教学模型,可以是校内、校外个人或者单位注册账号,登陆本实验平台网站,浏览,并进行实际操作,最大化资源利用效果。
本实验教学对学生的评价主要包括四个方面:课程实验的出勤率、平时实验过程(实验报告)的完成情况、上机操作考核情况及学生在课堂之外的实验情况。对实验指导老师的评价主要包括三个方面,包括对实验内容的设计与更新、实验的过程管理及在线指导情况。通过这些客观的评测,强化提高学生进行虚拟现实交互设计的能力,并促进老师对本实验教学完善。
课程预备知识:软件:unity3D+visual studio2013+steamVR框架进行开发,采用的语言为C#。unity3D对虚拟环境进行建立,使用C#语言对环境内交互行为进行编程,最终使用steamVR将设计,编程后的虚拟现实场景在VR头盔中进行显示。硬件:MSP540G2553、信号采集模块、处理结果发送模块和电源模块。软件包括在信息处理过程和处理信息时的MSP430程序。
一、实验目的
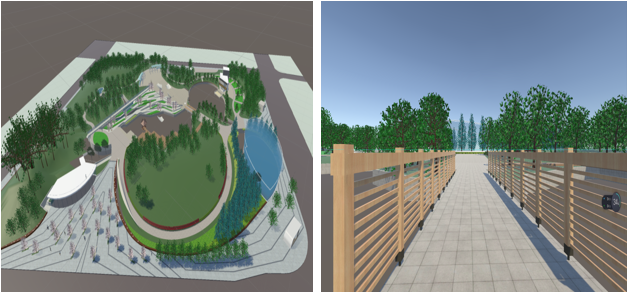
1. 以VR虚拟现实为基础,以健身自行车作为人机交互工具,综合运用了传感器技术,DSP控制技术,采用了多线程,非阻塞的实时数据通信技术,并通过立体显示等多通道交互技术而实现,让参与者置身在虚拟环境中进行漫游,当参与者进行体验时,转向与速度通过传感器的实时采集,然后经过DSP控制电路传到计算机,经过分析处理,使其在屏幕的虚拟场景得到仿真和演示,在虚拟场景中达到表演的效果,提升学生对虚拟现实交互技术的了解。
2. 学生能亲自动做实验,观察实验现象,记录实验数据,验证公式、原理定理;
二、实验原理及内容
原理:
将自行车的运动信息稳定准确的传送的虚拟现实的环境中,硬件上因为市面上的健身自行车并无硬件接口使用户能活得其运动中的信息,并且健身自行车的车头是固定的,无法旋转,解决自行车运动数据的传送与输出是在硬件上需要解决的问题。软件上,当我们获得了自行车发送的运动数据,首先对数据进行预处理,筛选出有效的数据,并且根据获得的数据建立自行车运动的数学模型,从而实现对自行车运动在虚拟现实环境下的模拟是软件开发上的问题。
内容:
1. 在动感单车的基础上为其添加的角度传感器以及光电传感器以获得自行车运动过程中的速度与方向信息。
2. 使用DSP实时通信技术,使传感器所或得数据及时稳定的传送到计算机。
3. 在虚拟现实的开发环境中,利用接收的数据模拟自行车的运动状态,在虚拟现实环境中进行呈现。
三、实验仪器设备及平台
操作系统: Win7/Win10
软件: unity3D,visual studio2013,steamVR
硬件:HTC VIVE,动感单车,MSP430系列单片机,反射式光电门,滑动电位器,ZigBee模块。
四、实验内容与步骤
(1)平台安装配置步骤
首先在符合运行环境的计算机上安装并运行
unity,steamVR, visual
studio2013 软件。
(2)实验步骤
1.中心控制与处理模块设计
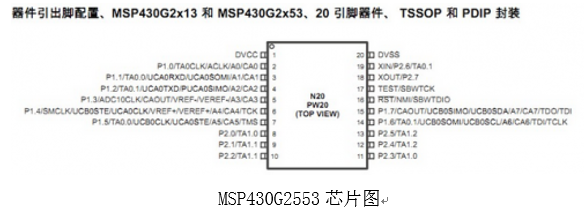
本次硬件功能实现的过程中,所采用的是MSP430G2553芯片进行控制和处理的。它是属于MSP系统的一款单片机。该系列是由美国德州仪器(TI)生产的一种16位超低功耗单片机,并且于上个世纪末开始向市场推广。它们的组成主要包括两个部分,一个部分是MSP430单片机的CPU,第二部分是针对不同的应用而提供的外围模块。该系列单片机的优势是由于具有16位RISC结构,其运算能力强。同时丰富的片内外设可以满足非常广泛的应用范围。
MSP430系列单片机具有以下特点:
1)以MSP430G2553为例,其工作电压范围为1.8V至3.3V。正是由于低电压的工作范围,其功耗超低;
2)具有16位的RISC结构使其具有强大的处理能力;
3)由于高性能模拟技术及丰富的片上外围模块,可以满足多种实际应用;
4)通过实际验证,芯片可以稳定工作;
5)方便灵活的开发环境,可供初学者快速上手。
本次频标比对系统的设计选取的是MSPG2553单片机。由于其内部集成了片内JTAG调试接口,所以在可以满足多次编程的同时在线编程和调试。
单片机开发环境
针对MSP430单片机有着完善的开发环境,目前常用的是IAR的开发坏境Embedded Workbench与TI自己的开发环境Code Composer Studio(CCS)。CCS包含着一整套工具,该工具可供开发和调试嵌入式应用。同时该开发环境包含着每个TI器件系列的多种功能,如调试器、项目构建环境、仿真器等。同时使用者可以根据它提供的单个用户界面来完成应用开发流程,初学者能够利用熟悉的工具和界面快速上手并将功能添加至所需的应用,从而完成工程创建。本论文系统的设计选用CCS作为开发环境正是由于它为构建软件开发环境提供了出色的软件框架,并且通过与先进的嵌入式调试功能相结合,从而为使用者提供一个简便、功能丰富的开发环境。
2.速度测量模块设计
反射式光电门
该传感器模块对环境光线适应能力强,其具有一对红外线发射与接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后,绿色指示灯会亮起,同时信号输出接口输出数字信号(一个低电平信号),可通过电位器旋钮调节检测距离,有效距离范围2~30cm,工作电压为3.3V-5V。该传感器的探测距离可以通过电位器调节、具有干扰小、便于装配、使用方便等特点,可以广泛应用于机器人避障、避障小车、流水线计数及黑白线循迹等众多场合。
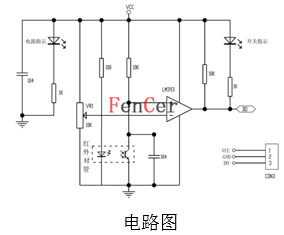
模块描述
① 当模块检测到前方障碍物信号时,电路板上绿色指示灯点亮电平,同时OUT端口持续输出低电平信号,该模块检测距离2~30cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
② 传感器主动红外线反射探测,因此目标的反射率和形状是探测距离的关键。其中黑色探测距离最小,白色最大;小面积物体距离小,大面积距离大。
③ 传感器模块输出端口OUT可直接与单片机IO口连接即可,也可以直接驱动一个5V继电器;连接方式:VCC-VCC;GND-GND;OUT-IO
④ 比较器采用LM393,工作稳定;
⑤ 可采用3-5V直流电源对模块进行供电。当电源接通时,红色电源指示灯点亮;
⑥ 具有3mm的螺丝孔,便于固定、安装;
⑦ 电路板尺寸:3.2CM*1.4CM
⑧ 每个模块在发货已经将阈值比较电压通过电位器调节好,非特殊情况,请勿随意调节电位器。
模块接口说明
① VCC 外接3.3V-5V电压(可以直接与5v单片机和3.3v单片机相连)
② GND 外接GND
③ OUT 小板数字量输出接口(0和1)
3.角度传感器设计
滑动变阻器是电路元件,它可以通过来改变自身的电阻,从而起到控制电路的作用。在电路分析中,滑动变阻器既可以作为一个定值电阻,也可以作为一个变值电阻。滑动变阻器的构成一般包括接线柱、 滑片、电阻丝、金属杆和瓷筒等五部分。滑动变阻器的电阻丝绕在绝缘瓷筒上,电阻丝外面涂有绝缘漆。在本次使用中运用阻值的变化判断自行车头旋转的角度。
4.发射模块设计
在硬件模块中使用的是ZigBee模块来进行发送数据的,ZigBee是基于IEEE802.15.4标准的低功耗局域网协议。根据国际标准规定,ZigBee技术是一种短距离、低功耗的无线通信技术。这一名称(又称紫蜂协议)来源于蜜蜂的八字舞,由于蜜蜂(bee)是靠飞翔和“嗡嗡”(zig)地抖动翅膀的“舞蹈”来与同伴传递花粉所在方位信息,也就是说蜜蜂依靠这样的方式构成了群体中的通信网络。其特点是近距离、低复杂度、自组织、低功耗、低数据速率。主要适合用于自动控制和远程控制领域,可以嵌入各种设备。简而言之,ZigBee就是一种便宜的,低功耗的近距离无线组网通讯技术ZigBee是一种低速短距离传输的无线网络协议。ZigBee协议从下到上分别为物理层
(PHY)、媒体访问控制层(MAC)、传输层(TL)、网络层
(NWK)、应用层
(APL)等。其中物理层和媒体访问控制层遵循IEEE802.15.4标准的规定。
5.数据接收并在虚拟现实环境中模拟运动
使用c#读取串口数据,对数据进行处理,得到速度信息和方向信息,将得到的速度和方向信息输入模拟自行车运动的模型,模拟出自行车的运动状态。最后将模拟出的状态在VR头盔中显示。
五、实验结果与数据处理
该系统以VR虚拟现实为基础,以健身自行车作为人机交互工具,综合运用了传感器技术,DSP控制技术,采用了多线程,非阻塞的实时数据通信技术,并通过立体显示等多通道交互技术而实现,让参与者置身在虚拟环境中进行漫游,当参与者进行体验时,转向与速度通过传感器的实时采集,然后经过DSP控制电路传到计算机,经过分析处理,使其在屏幕的虚拟场景得到仿真和演示,在虚拟场景中达到表演的效果。学生在仿真平台上输入自己模拟方式,结合分析已有的监测数据,对方法的有效性及可行性进行验证,对学生设计的方法优劣进行分析和评价。
六、网络条件要求
(1)说明客户端到服务器的带宽要求(需提供测试带宽服务)带宽 > 100 Mbps
(2)说明能够提供的并发响应数量(需提供在线排队提示服务)并发响应数不少于10个。
七、项目成果
本项目获第十二届研电赛陕西省赛区二等奖。